Manual del Curso de Timonel de Yate de Vela y Motor
 San Isidro, Argentina
San Isidro, Argentina
 CVPB - Jorge Messano
CVPB - Jorge Messano
 21-Abre-2026
21-Abre-2026
 9 minutos
9 minutos
Capítulo 03: Navegación
El Problema de la Posición: Métodos de Posicionamiento en Navegación por Estima
Introducción
Los métodos de posicionamiento asociados a la navegación por estima se aplican, en general, pero no exclusivamente, en aguas abiertas cuando no hay otras referencias para efectuar el monitoreo de la derrota. Parte de un punto de origen localizado con cierta precisión en la carta —un punto "Fix" o "LOP" por ejemplo— y proyecta la posición actual o futura del barco en función del rumbo, la velocidad y el tiempo navegado o a navegar.
Sin embargo, como la derrota real se ve continuamente afectada por el viento, las corrientes y factores humanos, la posición obtenida puede ser solo calificada como una posición estimada —de allí su nombre—.
Explicaremos ahora el método de posicionamiento factible de ser utilizado en una navegación por estima
Posicionamiento Por Estima
El método de posicionamiento por estima, también conocido como estima directa o estima gráfica —o dead reckoning en inglés— calcula la posición actual proyectándola a partir de una posición anterior conocida, utilizando como parámetros el rumbo, la velocidad y el tiempo, para dos casos posibles:

Averiguar la Posición Futura
En este caso se desea estimar en que posición estará la embarcación, luego de navegar manteniendo un determinado rumbo y velocidad, por un tiempo dado.
Este caso es claramente una proyección en el tiempo, cuyo grado de error dependerá de cuan estable se mantenga el rumbo y la velocidad propuestas para el cálculo.
Averiguar la Posición Actual
En este caso se desea estimar en que posición se encuentra la embarcación, luego de haber navegado durante un determinado tiempo, manteniendo un rumbo y velocidad estables.
En este caso, el margen de error de la estima de la posición aumenta progresivamente con el tiempo navegado, debido a las inevitables variaciones reales de velocidad y rumbo a lo largo de la derrota. Dichas variaciones pueden deberse a la deriva y al abatimiento producidos por corrientes y vientos, así como a cualquier desvío involuntario del timonel.
Veamos un ejemplo.
planteo
Nuestra última posición "fix" fue la siguiente:
| bitácora BV "Primavera" | |
| fecha y hora | : 10:05 29-Nov-2025 |
| Dm2025 | : -11º |
| δ | : +1º |
| φ | : 36º 18,83' S |
| ω | : 056º 40,29’ W |
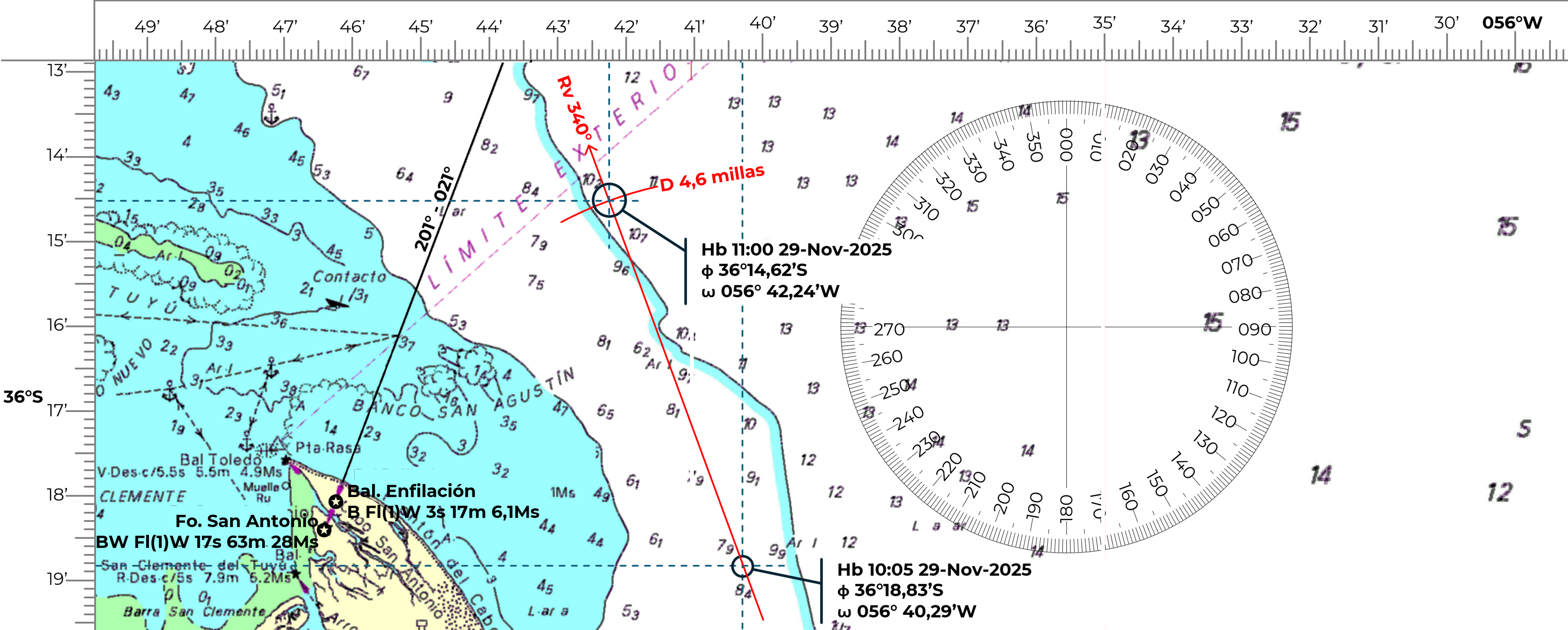
Desde esa posición, hemos continuado navegando con rumbo compás 350º a una velocidad constante de 5,0 nudos.
A la hora bitácora 11:00 hs del 29-Nov-2025, y sin puntos notables a la vista, queremos verificar nuestra posición por estima gráfica considerando como última posición fiable la anotada en bitácora para las 10:05 hs de hoy.
Veamos la resolución del caso:
paso 1
Anotar los Datos de Trabajo.
El primer paso consiste en recopilar todos los parámetros de la navegación para realizar el posicionamiento.
Resumiremos entonces los datos de la bitácora correspondientes a la hora 10:05, pues en ellos se encuentran las referencias para comenzar la resolución de la estima, y luego los parámetros registrados a las 11:00 hs relativos a rumbo y velocidad, que servirán luego para completar el procedimiento de estima gráfica de la posición.
| bitácora BV "Primavera" | |
| fecha y hora | : 10:05 29-Nov-2025 |
| Dm2025 | : -11º |
| δ | : +1º |
| φ | : 36º 18,83' S |
| ω | : 056º 40,29’ W |
| fecha y hora | : 11:00 29-Nov-2025 |
| Rc | : 350º |
| Ve | : 5,0 nudos |
paso 2
Procesar las Líneas de Posición.
En este caso, la única línea de posición con la que contamos es la del rumbo, y su módulo es el de la distancia navegada en el espacio de tiempo entre ambas entradas horarias de la bitácora.
Para avanzar con este punto, convertiremos primero el rumbo compás a verdadero.
| Rv | = Rc + Dm + δ = |
| = 350º + -11º + +1º = | |
| = 340º |
...y luego calcularemos la distancia navegada.
| D | = (11:00 hs - 10:05 hs) x 5,0 nudos = |
| = 00:55 hs x 5,0 nudos = | |
| = 4,6 millas |
paso 3
Trazar las Líneas de Posición en la Carta Náutica y Estimar la Ubicación.
Para resolver el caso debe trazarse la línea de posición dada por el rumbo verdadero "Rv", limitándola con la distancia "D" navegada.
Con estos datos puede actualizarse la bitácora.
| bitácora BV "Primavera" | |
| fecha y hora | : 11:00 29-Nov-2025 |
| Dm2025 | : -11º |
| δ | : +1º |
| Rc | : 350º |
| Ve | : 5,0 nudos |
| Posición: Est | |
| φ | : 36º 14,62' S |
| ω | : 056º 42,24’ W |
Con este último paso completamos el proceso de estima gráfica de la posición.
Nótese que en la bitácora se ha anotado que la posición es "Est", por "estimada" —en el título siguiente se explican las abreviaturas para los posibles tipos de posiciones—.
Antes de irnos, hago dos comentarios finales:
Uno: Tal como el autor ha explicado ya varias veces, este método de posicionamiento tiene un factor de error intrínseco y difícil de controlar, generado por la influencia de la deriva y el abatimiento, además del comprensible error del timonel al mantener el rumbo.
Sin embargo, y sin desmerecer el trabajo del Timonel
, ese error se reduce cuando se navega con "piloto automático" y en condiciones de viento parejas cuando se trata de veleros.
Dos: También debemos reconocer que cuando no se cuenta con otros puntos notables a la vista, la estima gráfica se convierte en un recurso valioso.
Por eso, para que resulte realmente útil, es indispensable partir de posiciones base precisas, lo cual obliga a ser meticulosos y prolijos en la obtención de las líneas de posición que las determinan.
Abreviaturas para Indicar el Origen de la Posición
n la navegación tradicional, cada posición registrada en la bitácora debe ir acompañada no solo de la hora y las coordenadas, sino también del método con el que se las obtuvo, ya que esto determina el grado de fiabilidad del dato y permite reconstruir la derrota con rigor. La anotación del método se hace mediante abreviaturas estandarizadas y ampliamente usadas por navegantes de todo el mundo, especialmente cuando se combinan técnicas visuales, instrumentos clásicos y sistemas electrónicos.
Así, una posición obtenida mediante "GPS" suele marcarse como "GPS" o "FIX", mientras que una posición obtenida por "estima" se indica como "DR" —Dead Reckoning— o “Est”. Esta notación uniforme permite comprender de inmediato la fiabilidad de cada punto de la derrota y facilita tanto la toma de decisiones en los tramos siguientes de la navegación continua como la posterior reconstrucción o auditoría del viaje.
Estas son las abreviaturas comúnmente utilizadas.

GPS o Fix
Se utiliza para señalar las posiciones obtenidas mediante receptores de GPS.
En la carta se marca la posición con un punto dentro de un círculo, con la anotación "GPS".
El término "Fix" se utilizaba previamente a la aparición de los sistemas de posicionamiento global, para señalar Una posición suficiente precisa y confiable.
LOP (Line Of Position)
Usado para indicar que la posición se obtuvo por dos o más líneas de posición.
LOP Fix: Se aplica cuando la posición "LOP" resulta en un triángulo o polígono de área reducida y suficientemente fiable.
La posición "LOP" se acompaña en general con la abreviatura del tipo de líneas de posición utilizadas para estimarla.
| Rv; | Rumbo verdadero. |
| Dem: | Demora. |
| Ah: | Angulo horizontal. |
| ArC: | Arco Capaz. |
| Snd: | Sondaje. |
DR (Dead Reckoning) o Est
Se utiliza para señalar que la posición fue obtenida por estima gráfica.
Rdr o Rdr Fix
Se aplica cuando la posición es resultado de la lectura del RADAR.
Cel o Cel Fix
Si la posición surge de métodos de navegación astronómica.
 inicio
inicio
 escuela
escuela
 nota anterior
nota anterior
 nota siguiente
nota siguiente
En la próxima nota completaremos el tema, viendo los elementos que hacen a la navegación electrónica.
Mientras tanto, puede entretenerse con este ejercicio.

Fuentes
Este texto forma parte del Manual de Instrucción del Curso de Timonel de Yate de Vela y Motor de la Escuela de Náutica del Club de Veleros Piedrabuena.
ISBN 978-987-88-2752-0
Reproducido con autorización del autor.
